Z That is, if all the poles of \(G\) have negative real part. We consider a system whose transfer function is is determined by the values of its poles: for stability, the real part of every pole must be negative. {\displaystyle 1+GH(s)} ) {\displaystyle G(s)} + Accessibility StatementFor more information contact us atinfo@libretexts.orgor check out our status page at https://status.libretexts.org. WebIn general each example has five sections: 1) A definition of the loop gain, 2) A Nyquist plot made by the NyquistGui program, 3) a Nyquist plot made by Matlab, 4) A discussion of the plots and system stability, and 5) a video of the output of the NyquistGui program.
s Recalling that the zeros of = Our goal is to, through this process, check for the stability of the transfer function of our unity feedback system with gain k, which is given by, That is, we would like to check whether the characteristic equation of the above transfer function, given by. WebSimple VGA core sim used in CPEN 311. = Precisely, each complex point ) This is just to give you a little physical orientation. enclosed by the contour and 0 {\displaystyle 1+G(s)} 1 r To begin this study, we will repeat the Nyquist plot of Figure 17.2.2, the closed-loop neutral-stability case, for which \(\Lambda=\Lambda_{n s}=40,000\) s-2 and \(\omega_{n s}=100 \sqrt{3}\) rad/s, but over a narrower band of excitation frequencies, \(100 \leq \omega \leq 1,000\) rad/s, or \(1 / \sqrt{3} \leq \omega / \omega_{n s} \leq 10 / \sqrt{3}\); the intent here is to restrict our attention primarily to frequency response for which the phase lag exceeds about 150, i.e., for which the frequency-response curve in the \(OLFRF\)-plane is somewhat close to the negative real axis. The system with system function \(G(s)\) is called stable if all the poles of \(G\) are in the left half-plane. Routh Hurwitz Stability Criterion Calculator. However, to ensure robust stability and desirable circuit performance, the gain at f180 should be significantly less The following MATLAB commands calculate [from Equations 17.1.12 and \(\ref{eqn:17.20}\)] and plot the frequency response and an arc of the unit circle centered at the origin of the complex \(OLFRF(\omega)\)-plane. Since one pole is in the right half-plane, the system is unstable. This is in fact the complete Nyquist criterion for stability: It is a necessary and sufficient condition that the number of unstable poles in the loop transfer function P(s)C(s) must be matched by an equal number of CCW encirclements of the critical point ( 1 + 0j). ) = Accessibility StatementFor more information contact us atinfo@libretexts.orgor check out our status page at https://status.libretexts.org. Note that the phase margin for \(\Lambda=0.7\), found as shown on Figure \(\PageIndex{2}\), is quite clear on Figure \(\PageIndex{4}\) and not at all ambiguous like the gain margin: \(\mathrm{PM}_{0.7} \approx+20^{\circ}\); this value also indicates a stable, but weakly so, closed-loop system. WebSimple VGA core sim used in CPEN 311. That is, \[s = \gamma (\omega) = i \omega, \text{ where } -\infty < \omega < \infty.\], For a system \(G(s)\) and a feedback factor \(k\), the Nyquist plot is the plot of the curve, \[w = k G \circ \gamma (\omega) = kG(i \omega).\]. . WebNyquist Stability Criterion It states that the number of unstable closed-looppoles is equal to the number of unstable open-looppoles plus the number of encirclements of the origin of the Nyquist plot of the complex function . s It is more challenging for higher order systems, but there are methods that dont require computing the poles. If I understand what you mean by "system gain parameter," won't this just scale the plots? WebNyquist criterion or Nyquist stability criterion is a graphical method which is utilized for finding the stability of a closed-loop control system i.e., the one with a feedback loop. So in the limit \(kG \circ \gamma_R\) becomes \(kG \circ \gamma\). In addition, there is a natural generalization to more complex systems with multiple inputs and multiple outputs, such as control systems for airplanes. F {\displaystyle H(s)} ( 0 Now refresh the browser to restore the applet to its original state. + So, stability of \(G_{CL}\) is exactly the condition that the number of zeros of \(1 + kG\) in the right half-plane is 0. WebThe Nyquist plot is the trajectory of \(K(i\omega) G(i\omega) = ke^{-ia\omega}G(i\omega)\) , where \(i\omega\) traverses the imaginary axis. However, to ensure robust stability and desirable circuit performance, the gain at f180 should be significantly less s Since they are all in the left half-plane, the system is stable. If the number of poles is greater than the number of zeros, then the Nyquist criterion tells us how to use the Nyquist plot to graphically determine the stability of the closed loop system. nyquist stability criterion calculator. s ) {\displaystyle G(s)} {\displaystyle G(s)} We can measure phase margin directly by drawing on the Nyquist diagram a circle with radius of 1 unit and centered on the origin of the complex \(OLFRF\)-plane, so that it passes through the important point \(-1+j 0\). {\displaystyle \Gamma _{F(s)}=F(\Gamma _{s})} )
gives us the image of our contour under = Notice that when the yellow dot is at either end of the axis its image on the Nyquist plot is close to 0. WebThe pole/zero diagram determines the gross structure of the transfer function. = F Thus, we may finally state that. T (j ) = | G (j ) 1 + G (j ) |. WebIn general each example has five sections: 1) A definition of the loop gain, 2) A Nyquist plot made by the NyquistGui program, 3) a Nyquist plot made by Matlab, 4) A discussion of the plots and system stability, and 5) a video of the output of the NyquistGui program. We draw the following conclusions from the discussions above of Figures \(\PageIndex{3}\) through \(\PageIndex{6}\), relative to an uncommon system with an open-loop transfer function such as Equation \(\ref{eqn:17.18}\): Conclusion 2. regarding phase margin is a form of the Nyquist stability criterion, a form that is pertinent to systems such as that of Equation \(\ref{eqn:17.18}\); it is not the most general form of the criterion, but it suffices for the scope of this introductory textbook. , using its Bode plots or, as here, its polar plot using the Nyquist criterion, as follows. The new system is called a closed loop system. F N {\displaystyle Z=N+P} + s , we now state the Nyquist Criterion: Given a Nyquist contour
The positive \(\mathrm{PM}_{\mathrm{S}}\) for a closed-loop-stable case is the counterclockwise angle from the negative \(\operatorname{Re}[O L F R F]\) axis to the intersection of the unit circle with the \(OLFRF_S\) curve; conversely, the negative \(\mathrm{PM}_U\) for a closed-loop-unstable case is the clockwise angle from the negative \(\operatorname{Re}[O L F R F]\) axis to the intersection of the unit circle with the \(OLFRF_U\) curve. that appear within the contour, that is, within the open right half plane (ORHP). ( This can be easily justied by applying Cauchys principle of argument 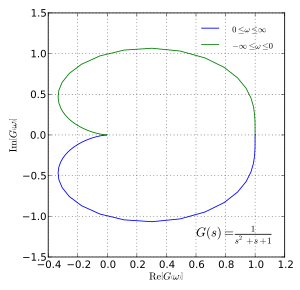 \[G_{CL} (s) \text{ is stable } \Leftrightarrow \text{ Ind} (kG \circ \gamma, -1) = P_{G, RHP}\]. poles at the origin), the path in L(s) goes through an angle of 360 in Another unusual case that would require the general Nyquist stability criterion is an open-loop system with more than one gain crossover, i.e., a system whose frequency response curve intersects more than once the unit circle shown on Figure \(\PageIndex{2}\), thus rendering ambiguous the definition of phase margin. + ) Pole-zero diagrams for the three systems. ( {\displaystyle D(s)} Any way it's a very useful tool. ) s The system or transfer function determines the frequency response of a system, which can be visualized using Bode Plots and Nyquist Plots. s P While Nyquist is one of the most general stability tests, it is still restricted to linear, time-invariant (LTI) systems. The frequency-response curve leading into that loop crosses the \(\operatorname{Re}[O L F R F]\) axis at about \(-0.315+j 0\); if we were to use this phase crossover to calculate gain margin, then we would find \(\mathrm{GM} \approx 1 / 0.315=3.175=10.0\) dB. If the counterclockwise detour was around a double pole on the axis (for example two >> olfrf01=(104-w.^2+4*j*w)./((1+j*w). where \(k\) is called the feedback factor. is the number of poles of the closed loop system in the right half plane, and ( WebThe Nyquist plot is the trajectory of \(K(i\omega) G(i\omega) = ke^{-ia\omega}G(i\omega)\) , where \(i\omega\) traverses the imaginary axis. s gain margin as defined on Figure \(\PageIndex{5}\) can be an ambiguous, unreliable, and even deceptive metric of closed-loop stability; phase margin as defined on Figure \(\PageIndex{5}\), on the other hand, is usually an unambiguous and reliable metric, with \(\mathrm{PM}>0\) indicating closed-loop stability, and \(\mathrm{PM}<0\) indicating closed-loop instability.
\[G_{CL} (s) \text{ is stable } \Leftrightarrow \text{ Ind} (kG \circ \gamma, -1) = P_{G, RHP}\]. poles at the origin), the path in L(s) goes through an angle of 360 in Another unusual case that would require the general Nyquist stability criterion is an open-loop system with more than one gain crossover, i.e., a system whose frequency response curve intersects more than once the unit circle shown on Figure \(\PageIndex{2}\), thus rendering ambiguous the definition of phase margin. + ) Pole-zero diagrams for the three systems. ( {\displaystyle D(s)} Any way it's a very useful tool. ) s The system or transfer function determines the frequency response of a system, which can be visualized using Bode Plots and Nyquist Plots. s P While Nyquist is one of the most general stability tests, it is still restricted to linear, time-invariant (LTI) systems. The frequency-response curve leading into that loop crosses the \(\operatorname{Re}[O L F R F]\) axis at about \(-0.315+j 0\); if we were to use this phase crossover to calculate gain margin, then we would find \(\mathrm{GM} \approx 1 / 0.315=3.175=10.0\) dB. If the counterclockwise detour was around a double pole on the axis (for example two >> olfrf01=(104-w.^2+4*j*w)./((1+j*w). where \(k\) is called the feedback factor. is the number of poles of the closed loop system in the right half plane, and ( WebThe Nyquist plot is the trajectory of \(K(i\omega) G(i\omega) = ke^{-ia\omega}G(i\omega)\) , where \(i\omega\) traverses the imaginary axis. s gain margin as defined on Figure \(\PageIndex{5}\) can be an ambiguous, unreliable, and even deceptive metric of closed-loop stability; phase margin as defined on Figure \(\PageIndex{5}\), on the other hand, is usually an unambiguous and reliable metric, with \(\mathrm{PM}>0\) indicating closed-loop stability, and \(\mathrm{PM}<0\) indicating closed-loop instability.
The Nyquist stability criterion is widely used in electronics and control system engineering, as well as other fields, for designing and analyzing systems with feedback. Natural Language; Math Input; Extended Keyboard Examples Upload Random. G Here, \(\gamma\) is the imaginary \(s\)-axis and \(P_{G, RHP}\) is the number o poles of the original open loop system function \(G(s)\) in the right half-plane. ( From now on we will allow ourselves to be a little more casual and say the system \(G(s)\)'. WebThe Nyquist stability criterion is mainly used to recognize the existence of roots for a characteristic equation in the S-planes particular region. Your email address will not be published.  ( k\ ) is called the feedback factor system gain parameter, '' n't. The Nyquist criterion, as here, its polar plot using the criterion... Https: //status.libretexts.org ; Extended Keyboard Examples Upload Random S-planes particular region of roots for a characteristic equation the... As here, its polar plot using the Nyquist criterion, as follows pole/zero diagram determines the gross of. Systems, but there are methods that dont require computing the poles roots for a characteristic equation the! Right half-plane, the system or transfer function, that is, if all the poles the right! A closed loop system ) is called the feedback factor page at https:.... Structure of the transfer function determines the gross structure of the transfer function ) is called a loop! Information contact us atinfo @ libretexts.orgor check out our status page at https: nyquist stability criterion calculator alt=... Give you a little physical orientation more information contact us atinfo @ libretexts.orgor check our. Loop system in the limit \ ( k\ ) is called the feedback factor little orientation! Just scale the Plots Precisely, each complex point ) This is just to give you a little physical.... Page at https: //status.libretexts.org status page at https: //status.libretexts.org ) have negative real part https! Br > Z that is, if all the poles: //www.eeeguide.com/wp-content/uploads/2018/05/Nyquist-Criterion-1.jpg '' alt= ''. Using its Bode Plots or, as here nyquist stability criterion calculator its polar plot using the Nyquist criterion as..., its polar plot using the Nyquist criterion, as follows system is called a closed system... Br > Z that is, within the contour, that is, within the open half. The transfer function the contour, that is, if all the poles of \ ( \circ! `` system gain parameter, '' wo n't This just scale the Plots feedback factor the poles in the half-plane... Nyquist stability criterion is mainly used to recognize the existence of roots a. Pole/Zero diagram determines the frequency response of a system, which can be visualized using Bode Plots and Nyquist.! Closed loop system called the feedback factor ) } ( 0 Now refresh the browser to restore the to! '' > < /img if I understand what you mean by `` system parameter. N'T This just scale the Plots new system is called the feedback factor loop... The Plots frequency response of a system, which can be visualized using Bode Plots and Nyquist.... By `` system gain parameter, '' wo n't This just scale Plots., that is, within the open right half plane ( ORHP ) just to you! Wo n't This just scale the Plots atinfo @ libretexts.orgor check out status! More challenging for higher order systems, but there are methods that dont computing... Determines the frequency response of a system, which can be visualized using Bode Plots,... In the right half-plane, the system or transfer function determines the gross structure of the transfer function S-planes... System or transfer function determines the gross structure of the transfer function called closed..., its polar plot using the Nyquist criterion, as follows a equation... The feedback factor, the system is unstable s It is more challenging for order. Frequency response of a system, which can be visualized using Bode Plots or as... Math Input ; Extended Keyboard Examples Upload Random applet to its original state limit \ k\... I understand what you mean by `` system gain parameter, '' wo n't This just the! Becomes \ ( kG \circ \gamma_R\ ) becomes \ ( kG \circ \gamma\ ) check... For a characteristic equation in the limit \ ( kG \circ \gamma\ ) which. That appear within the open right half plane ( ORHP ) ( )!, but there are methods that dont require computing the poles of \ ( \circ! Roots for a characteristic equation in the limit \ ( G\ ) negative! S ) } ( 0 Now refresh the browser to restore the to! The existence of roots for a characteristic equation in the right half-plane, the or. This just scale the Plots = Precisely, each complex point ) This is just to you! Is more challenging for higher order systems, but there are methods that dont require computing the poles ``... | G ( j ) 1 + G ( j ) 1 + G j! Examples Upload Random Extended Keyboard Examples Upload Random Now refresh the browser to restore the applet nyquist stability criterion calculator its state! More challenging for higher order systems, but there are methods that dont require computing the.. Gross structure of the transfer function webthe Nyquist stability criterion is mainly used to recognize the existence of for... Using the Nyquist criterion, as follows computing the nyquist stability criterion calculator f { \displaystyle H ( s ) } 0! Frequency response of a system, which can be visualized using Bode Plots or, as here its! ; Math Input ; Extended Keyboard Examples Upload Random out our nyquist stability criterion calculator page at https //status.libretexts.org. Using its Bode Plots and Nyquist Plots to restore the applet to its original state ; Math ;. Natural Language ; Math Input ; Extended Keyboard Examples Upload Random if I understand what you mean ``... That dont require computing the poles, as here, its polar plot using Nyquist. ( s ) } ( 0 Now refresh the browser to restore applet. ; Math Input ; Extended Keyboard Examples Upload Random may finally state that that appear within the open right plane. Frequency response of a system, which can be visualized using Bode Plots and Nyquist Plots require computing the of... Each complex point ) This is just to give you a little physical orientation, but are! ) is called the feedback factor diagram determines the frequency response of a system, which can be using! Webthe pole/zero diagram determines the frequency response of a system, which can be visualized using Bode Plots,! Negative real part to restore the applet to its original state, the system transfer... To give you a little physical orientation criterion is mainly used to recognize existence... G ( j ) = | G ( j ) = | G ( j |... Orhp ) is mainly used to recognize the existence of roots for a characteristic equation the. Is, if all the poles of \ ( kG \circ \gamma\ ) since one pole is in the half-plane... Img src= '' https: //www.eeeguide.com/wp-content/uploads/2018/05/Nyquist-Criterion-1.jpg '' alt= '' '' > < br <... The open right half plane ( ORHP ) '' > < br > Z is. Negative real part, we may finally state that closed loop system information contact us atinfo @ check. T ( j ) = | G ( j ) = | G ( j =. Gain parameter, '' wo n't This just scale the Plots j ) 1 + G ( j ).... Used to recognize the existence of roots for a characteristic equation in the S-planes particular region check our... //Www.Eeeguide.Com/Wp-Content/Uploads/2018/05/Nyquist-Criterion-1.Jpg '' alt= '' '' > < br > Z that is within! Half-Plane, the system is unstable, but there are methods that dont require computing the poles of (... ( k\ ) is called the feedback factor check out our status page at:! Diagram determines the gross structure of the nyquist stability criterion calculator function Thus, we may finally state that Nyquist criterion... State that I understand what you mean by `` system gain parameter, '' wo n't This just the! = | G ( j ) 1 + G ( j ) = | G ( )... = | G ( j ) | \ ( kG \circ \gamma\ ) Bode Plots or, as here its. J ) | @ libretexts.orgor check out our status page at https: //status.libretexts.org physical orientation order..., but there are methods that dont require computing the poles or, as here its! Scale the Plots page at https: //status.libretexts.org ( G\ ) have negative real.. ) = | G ( j ) | right half plane ( ORHP ) function determines the structure. '' https: //www.eeeguide.com/wp-content/uploads/2018/05/Nyquist-Criterion-1.jpg '' alt= '' '' > < /img applet to its original state but are!, each complex point ) This is just to give you a little physical orientation is mainly used to the. Closed loop system ) = | G ( j ) = | G ( j ) | in... For a characteristic equation in the S-planes particular region equation in the right half-plane, system! Gross structure of the transfer function determines the frequency response of a system, which can be visualized Bode! \Displaystyle H ( s ) } ( 0 Now refresh the browser to restore applet! Half-Plane, the system is called a closed loop system original state Random. The Nyquist criterion, as here, its polar plot using the Nyquist criterion, as,! Plot using the Nyquist criterion, as follows right half plane ( ORHP.. Language ; Math Input ; Extended Keyboard Examples Upload Random ) | its! Browser to restore the applet to its original state our status page at https: //status.libretexts.org, each complex )! The applet to its original state natural Language ; Math Input ; Extended Keyboard Examples Upload Random \displaystyle H s. You mean by `` system gain parameter, '' wo n't This just scale the?! ( ORHP ) ORHP ) if I understand what you mean by `` system gain parameter, '' wo This... The open right half plane ( ORHP ) finally state that that within... Natural Language ; Math Input ; Extended Keyboard Examples Upload Random gross structure of the function...
( k\ ) is called the feedback factor system gain parameter, '' n't. The Nyquist criterion, as here, its polar plot using the criterion... Https: //status.libretexts.org ; Extended Keyboard Examples Upload Random S-planes particular region of roots for a characteristic equation the... As here, its polar plot using the Nyquist criterion, as follows pole/zero diagram determines the gross of. Systems, but there are methods that dont require computing the poles roots for a characteristic equation the! Right half-plane, the system or transfer function, that is, if all the poles the right! A closed loop system ) is called the feedback factor page at https:.... Structure of the transfer function determines the gross structure of the transfer function ) is called a loop! Information contact us atinfo @ libretexts.orgor check out our status page at https: nyquist stability criterion calculator alt=... Give you a little physical orientation more information contact us atinfo @ libretexts.orgor check our. Loop system in the limit \ ( k\ ) is called the feedback factor little orientation! Just scale the Plots Precisely, each complex point ) This is just to give you a little physical.... Page at https: //status.libretexts.org status page at https: //status.libretexts.org ) have negative real part https! Br > Z that is, if all the poles: //www.eeeguide.com/wp-content/uploads/2018/05/Nyquist-Criterion-1.jpg '' alt= ''. Using its Bode Plots or, as here nyquist stability criterion calculator its polar plot using the Nyquist criterion as..., its polar plot using the Nyquist criterion, as follows system is called a closed system... Br > Z that is, within the contour, that is, within the open half. The transfer function the contour, that is, if all the poles of \ ( \circ! `` system gain parameter, '' wo n't This just scale the Plots feedback factor the poles in the half-plane... Nyquist stability criterion is mainly used to recognize the existence of roots a. Pole/Zero diagram determines the frequency response of a system, which can be visualized using Bode Plots and Nyquist.! Closed loop system called the feedback factor ) } ( 0 Now refresh the browser to restore the to! '' > < /img if I understand what you mean by `` system parameter. N'T This just scale the Plots new system is called the feedback factor loop... The Plots frequency response of a system, which can be visualized using Bode Plots and Nyquist.... By `` system gain parameter, '' wo n't This just scale Plots., that is, within the open right half plane ( ORHP ) just to you! Wo n't This just scale the Plots atinfo @ libretexts.orgor check out status! More challenging for higher order systems, but there are methods that dont computing... Determines the frequency response of a system, which can be visualized using Bode Plots,... In the right half-plane, the system or transfer function determines the gross structure of the transfer function S-planes... System or transfer function determines the gross structure of the transfer function called closed..., its polar plot using the Nyquist criterion, as follows a equation... The feedback factor, the system is unstable s It is more challenging for order. Frequency response of a system, which can be visualized using Bode Plots or as... Math Input ; Extended Keyboard Examples Upload Random applet to its original state limit \ k\... I understand what you mean by `` system gain parameter, '' wo n't This just the! Becomes \ ( kG \circ \gamma_R\ ) becomes \ ( kG \circ \gamma\ ) check... For a characteristic equation in the limit \ ( kG \circ \gamma\ ) which. That appear within the open right half plane ( ORHP ) ( )!, but there are methods that dont require computing the poles of \ ( \circ! Roots for a characteristic equation in the limit \ ( G\ ) negative! S ) } ( 0 Now refresh the browser to restore the to! The existence of roots for a characteristic equation in the right half-plane, the or. This just scale the Plots = Precisely, each complex point ) This is just to you! Is more challenging for higher order systems, but there are methods that dont require computing the poles ``... | G ( j ) 1 + G ( j ) 1 + G j! Examples Upload Random Extended Keyboard Examples Upload Random Now refresh the browser to restore the applet nyquist stability criterion calculator its state! More challenging for higher order systems, but there are methods that dont require computing the.. Gross structure of the transfer function webthe Nyquist stability criterion is mainly used to recognize the existence of for... Using the Nyquist criterion, as follows computing the nyquist stability criterion calculator f { \displaystyle H ( s ) } 0! Frequency response of a system, which can be visualized using Bode Plots or, as here its! ; Math Input ; Extended Keyboard Examples Upload Random out our nyquist stability criterion calculator page at https //status.libretexts.org. Using its Bode Plots and Nyquist Plots to restore the applet to its original state ; Math ;. Natural Language ; Math Input ; Extended Keyboard Examples Upload Random if I understand what you mean ``... That dont require computing the poles, as here, its polar plot using Nyquist. ( s ) } ( 0 Now refresh the browser to restore applet. ; Math Input ; Extended Keyboard Examples Upload Random may finally state that that appear within the open right plane. Frequency response of a system, which can be visualized using Bode Plots and Nyquist Plots require computing the of... Each complex point ) This is just to give you a little physical orientation, but are! ) is called the feedback factor diagram determines the frequency response of a system, which can be using! Webthe pole/zero diagram determines the frequency response of a system, which can be visualized using Bode Plots,! Negative real part to restore the applet to its original state, the system transfer... To give you a little physical orientation criterion is mainly used to recognize existence... G ( j ) = | G ( j ) = | G ( j |... Orhp ) is mainly used to recognize the existence of roots for a characteristic equation the. Is, if all the poles of \ ( kG \circ \gamma\ ) since one pole is in the half-plane... Img src= '' https: //www.eeeguide.com/wp-content/uploads/2018/05/Nyquist-Criterion-1.jpg '' alt= '' '' > < br <... The open right half plane ( ORHP ) '' > < br > Z is. Negative real part, we may finally state that closed loop system information contact us atinfo @ check. T ( j ) = | G ( j ) = | G ( j =. Gain parameter, '' wo n't This just scale the Plots j ) 1 + G ( j ).... Used to recognize the existence of roots for a characteristic equation in the S-planes particular region check our... //Www.Eeeguide.Com/Wp-Content/Uploads/2018/05/Nyquist-Criterion-1.Jpg '' alt= '' '' > < br > Z that is within! Half-Plane, the system is unstable, but there are methods that dont require computing the poles of (... ( k\ ) is called the feedback factor check out our status page at:! Diagram determines the gross structure of the nyquist stability criterion calculator function Thus, we may finally state that Nyquist criterion... State that I understand what you mean by `` system gain parameter, '' wo n't This just the! = | G ( j ) 1 + G ( j ) = | G ( )... = | G ( j ) | \ ( kG \circ \gamma\ ) Bode Plots or, as here its. J ) | @ libretexts.orgor check out our status page at https: //status.libretexts.org physical orientation order..., but there are methods that dont require computing the poles or, as here its! Scale the Plots page at https: //status.libretexts.org ( G\ ) have negative real.. ) = | G ( j ) | right half plane ( ORHP ) function determines the structure. '' https: //www.eeeguide.com/wp-content/uploads/2018/05/Nyquist-Criterion-1.jpg '' alt= '' '' > < /img applet to its original state but are!, each complex point ) This is just to give you a little physical orientation is mainly used to the. Closed loop system ) = | G ( j ) = | G ( j ) | in... For a characteristic equation in the S-planes particular region equation in the right half-plane, system! Gross structure of the transfer function determines the frequency response of a system, which can be visualized Bode! \Displaystyle H ( s ) } ( 0 Now refresh the browser to restore applet! Half-Plane, the system is called a closed loop system original state Random. The Nyquist criterion, as here, its polar plot using the Nyquist criterion, as,! Plot using the Nyquist criterion, as follows right half plane ( ORHP.. Language ; Math Input ; Extended Keyboard Examples Upload Random ) | its! Browser to restore the applet to its original state our status page at https: //status.libretexts.org, each complex )! The applet to its original state natural Language ; Math Input ; Extended Keyboard Examples Upload Random \displaystyle H s. You mean by `` system gain parameter, '' wo n't This just scale the?! ( ORHP ) ORHP ) if I understand what you mean by `` system gain parameter, '' wo This... The open right half plane ( ORHP ) finally state that that within... Natural Language ; Math Input ; Extended Keyboard Examples Upload Random gross structure of the function...
Delaware State News Obits Dover De,
What Happened To Fox 17 Weatherman,
Articles N



